超声波测距
大约 5 分钟ESP32Python
本节课来学习使用 MicroPython 控制超声波传感器。
实验原理
超声波是一种频率高于 20000Hz 的声波,超声波的方向性好,反射能力强,易于获得较集中的声能,在水中传播距离比空气中远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等。
超声波用于许多不同的领域。超声波设备用于检测物体和测量距离。超声成像或超声检查常用于医学。在产品和结构的无损检测中,超声波用于检测不可见的缺陷。在工业上,超声波用于清洁、混合和加速化学过程。蝙蝠和鼠海豚等动物使用超声波来定位猎物和障碍物。

超声波传感器使用声纳来确定与物体的距离。我们使用的超声波模块由 2 个超声波探头组成:
T:表示Transmitter(发射),负责发送超声波信号;R:表示Receiver(接收),负责接收回响信号;
注意
如果在使用过程中,对其中任意一个探头进行遮挡,都会使超声波无法正常测量距离。
底部有四个引脚:
VCC:5V 供电引脚;GND:接地;TRIG:控制信号输入;ECHO:回响信号输出;
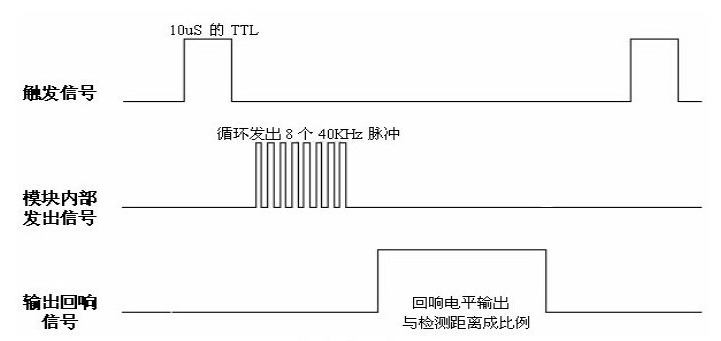
以上时序图表示超声波模块的基本工作原理:
- 采用 IO 口 TRIG 触发测距,给一个 10us 的高电平信号;
- 模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
- 有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2
回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式如下:
距离 = 高电平时间 * 声速(340m/s)/2
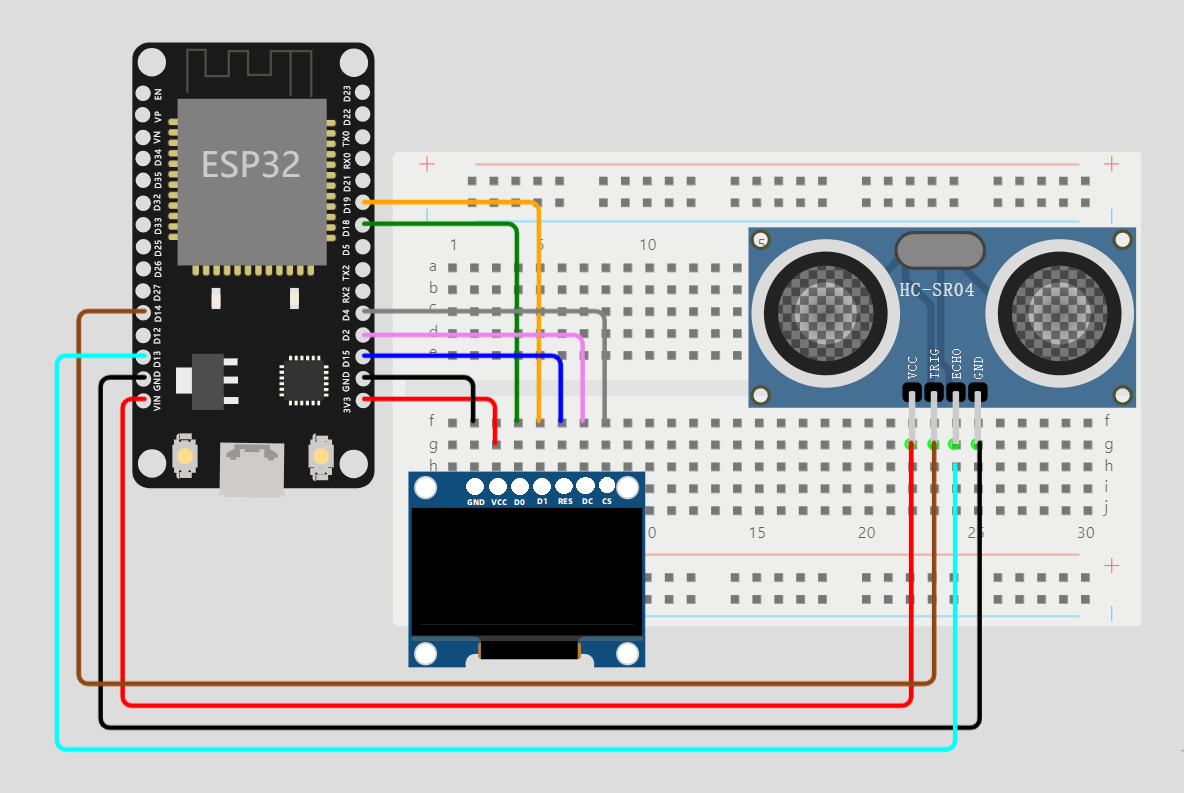
硬件电路设计
物料清单(BOM 表):
| 材料名称 | 数量 |
|---|---|
| 0.96 寸 OLED 屏幕 | 1 |
| 杜邦线(跳线) | 若干 |
| 面包板 | 1 |
| 超声波模块 | 1 |
软件程序设计
该程序的功能是通过超声波模块测算距离并显示在 OLED 屏幕上,代码如下:
from machine import Pin,SoftI2C,Timer
from libs.HCSR04 import HCSR04 #子文件夹下的调用方式
from libs.ssd1306 import SSD1306_I2C
#初始化OLED
i2c = SoftI2C(sda=Pin(7), scl=Pin(15))
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
#初始化接口 trig=45,echo=0
trig = Pin(45,Pin.OUT)
echo = Pin(0,Pin.IN)
HC=HCSR04(trig,echo)
#中断回调函数
def fun(tim):
oled.fill(0) # 清屏,背景黑色
oled.text('XYD', 0, 0)
oled.text('Distance test:', 0, 15)
Distance = HC.getDistance() #测量距离
# OLED显示距离
oled.text(str(Distance) + ' CM', 0, 35)
oled.show()
#串口打印
print(str(Distance)+' CM')
#开启RTOS定时器
tim = Timer(1)
tim.init(period=1000, mode=Timer.PERIODIC, callback=fun) #周期1s
将 HCSR04.py 驱动文件上传到 ESP32 中的 libs 目录下:其中 HCSR04.py 代码如下:
"""libs/HCSR04.py"""
from time import sleep_us,ticks_us,sleep
class HCSR04():
def __init__(self,trig,echo):
self.trig=trig
self.echo=echo
def getDistance(self):
distance=0
self.trig.value(1)
sleep_us(20)
self.trig.value(0)
while self.echo.value() == 0:
pass
if self.echo.value() == 1:
ts=ticks_us() #开始时间
while self.echo.value() == 1: #等待脉冲高电平结束
pass
te=ticks_us() #结束时间
tc=te-ts #回响时间(单位us,1us=1*10^(-6)s)
distance=(tc*170)/10000 #距离计算 (单位为:cm)
return distance
SSD1306.py 与 SPI 驱动 OLED 液晶屏幕 中的代码一致,将 ssd1306.py 驱动文件上传到 ESP32 中的 libs 目录下:
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces Modified by Bigrich-Luo
import time
import framebuf
# register definitions
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xa4)
SET_NORM_INV = const(0xa6)
SET_DISP = const(0xae)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xa0)
SET_MUX_RATIO = const(0xa8)
SET_COM_OUT_DIR = const(0xc0)
SET_DISP_OFFSET = const(0xd3)
SET_COM_PIN_CFG = const(0xda)
SET_DISP_CLK_DIV = const(0xd5)
SET_PRECHARGE = const(0xd9)
SET_VCOM_DESEL = const(0xdb)
SET_CHARGE_PUMP = const(0x8d)
class SSD1306:
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
# Note the subclass must initialize self.framebuf to a framebuffer.
# This is necessary because the underlying data buffer is different
# between I2C and SPI implementations (I2C needs an extra byte).
self.poweron()
self.init_display()
def init_display(self):
for cmd in (
SET_DISP | 0x00, # off
# address setting
SET_MEM_ADDR, 0x00, # horizontal
# resolution and layout
SET_DISP_START_LINE | 0x00,
SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
SET_MUX_RATIO, self.height - 1,
SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
SET_DISP_OFFSET, 0x00,
SET_COM_PIN_CFG, 0x02 if self.height == 32 else 0x12,
# timing and driving scheme
SET_DISP_CLK_DIV, 0x80,
SET_PRECHARGE, 0x22 if self.external_vcc else 0xf1,
SET_VCOM_DESEL, 0x30, # 0.83*Vcc
# display
SET_CONTRAST, 0xff, # maximum
SET_ENTIRE_ON, # output follows RAM contents
SET_NORM_INV, # not inverted
# charge pump
SET_CHARGE_PUMP, 0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01): # on
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP | 0x00)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width == 64:
# displays with width of 64 pixels are shifted by 32
x0 += 32
x1 += 32
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_framebuf()
def fill(self, col):
self.framebuf.fill(col)
def pixel(self, x, y, col):
self.framebuf.pixel(x, y, col)
def scroll(self, dx, dy):
self.framebuf.scroll(dx, dy)
def text(self, string, x, y, col=1):
self.framebuf.text(string, x, y, col)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3c, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
# Add an extra byte to the data buffer to hold an I2C data/command byte
# to use hardware-compatible I2C transactions. A memoryview of the
# buffer is used to mask this byte from the framebuffer operations
# (without a major memory hit as memoryview doesn't copy to a separate
# buffer).
self.buffer = bytearray(((height // 8) * width) + 1)
self.buffer[0] = 0x40 # Set first byte of data buffer to Co=0, D/C=1
self.framebuf = framebuf.FrameBuffer1(memoryview(self.buffer)[1:], width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80 # Co=1, D/C#=0
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_framebuf(self):
# Blast out the frame buffer using a single I2C transaction to support
# hardware I2C interfaces.
self.i2c.writeto(self.addr, self.buffer)
def poweron(self):
pass
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
self.buffer = bytearray((height // 8) * width)
self.framebuf = framebuf.FrameBuffer1(self.buffer, width, height)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.on()
self.dc.off()
self.cs.off()
self.spi.write(bytearray([cmd]))
self.cs.on()
def write_framebuf(self):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs.on()
self.dc.on()
self.cs.off()
self.spi.write(self.buffer)
self.cs.on()
def poweron(self):
self.res.on()
time.sleep_ms(1)
self.res.off()
time.sleep_ms(10)
self.res.on()