舵机实验
舵机在电子产品中非常常见,比如四足机器人、固定翼航模等都有应用,因此学习舵机对后续完成电子制作非常有意义。本节课学习使用 MicroPython 的 PWM 对 SG90 舵机旋转角度控制。
实验原理
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机只是一种通俗的叫法,其本质是一个伺服电机。

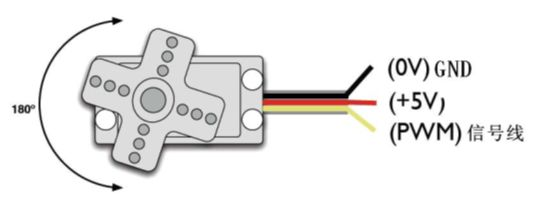
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。只要通过信号线给予规定的控制信号即可实现舵机码盘的转动。
SG90 的主要电气参数:
- 使用电压: 4.8V - 6V
- 尺寸: 221.5mm x 11.8mm x 22.7mm
- 重量: 9g
- 角度范围:0-180°
舵机的工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的 IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是 0 度到 180 度,当然也有 0 度到 360 度。
我们没有必要了解舵机的内部结构,只需要知道如何通过 PWM 控制其转动即可。舵机的控制就是通过一个固定的频率,给其不同的占空比的,来控制舵机不同的转角。
舵机的转动的角度是通过调节 PWM(脉冲宽度调制)信号的占空比来实现的,标准 PWM(脉冲宽度调制)信号的周期固定为 20ms(50Hz),理论上脉宽分布应在 1ms 到 2ms 之间,但是,事实上脉宽可由 0.5ms 到 2.5ms 之间,脉宽和舵机的转角 0°~180° 相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
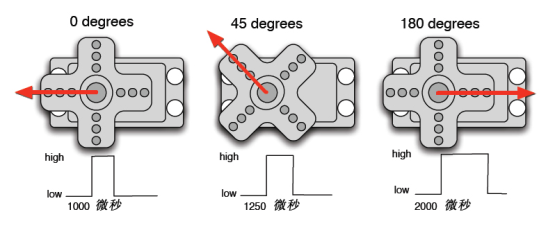
0.5-2.5ms 的 PWM 高电平部分对应控制 180 度舵机的 0-180 度,因此,对应的控制关系是这样的:
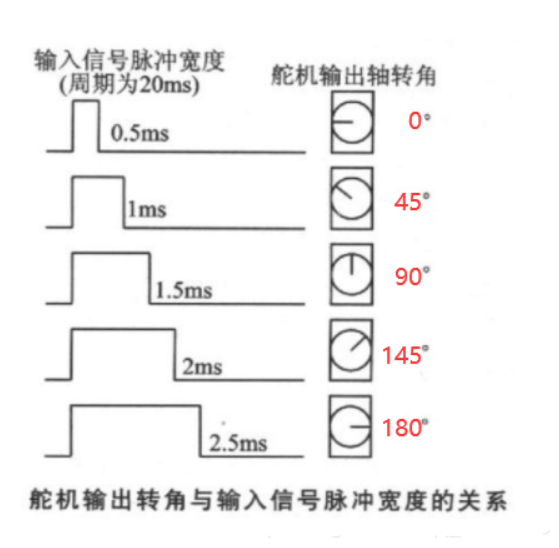
| 高电平占整个周期(20ms)的时间 | 舵机旋转的角度 | 对应的占空比 |
|---|---|---|
| 0.5ms | 0° | 0.5 // 20 |
| 1ms | 45° | 1 // 20 |
| 1.5ms | 90° | 1.5 // 20 |
| 2ms | 135° | 2 // 20 |
| 2.5ms | 180° | 2.5 // 20 |
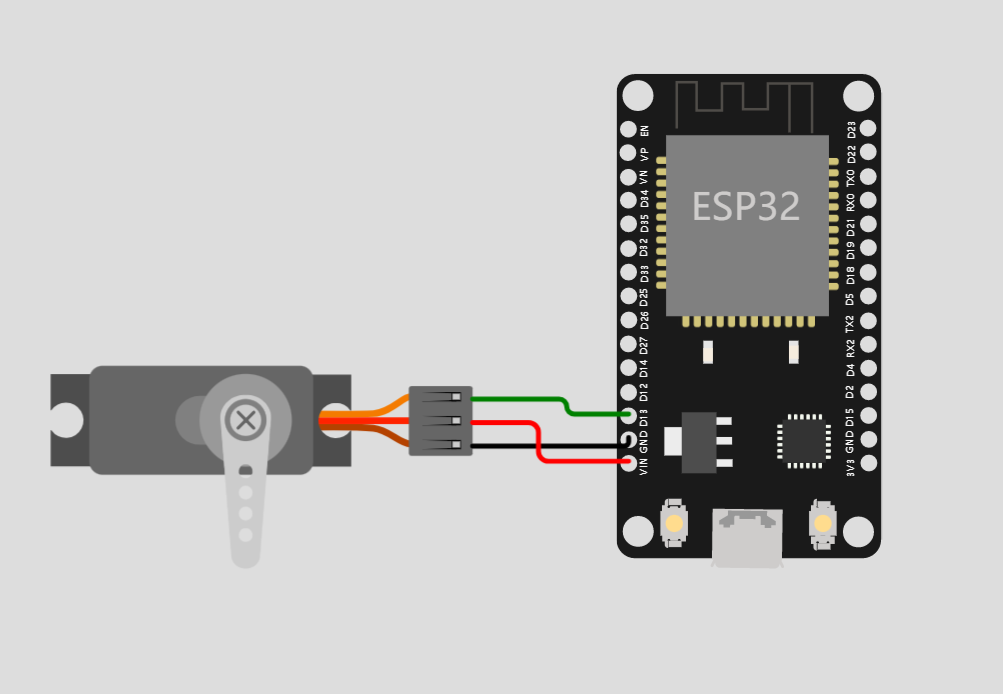
硬件电路设计
物料清单(BOM 表):
| 材料名称 | 数量 |
|---|---|
| 舵机 | 1 |
| 杜邦线(跳线) | 3 |
注意
注意接线顺序
软件程序设计
1. LEDC 输出 PWM 信号
首先,我们使用 LEDC 输出 PWM 信号,根据之前的实验原理,我们可以确定频率、最大脉宽 与 最小脉宽,代码如下:
// 1/20 秒,50Hz 的频率,20ms 的周期,这个变量用来存储时钟基准。
#define FREQ 50
// 通道(高速通道(0 ~ 7)由 80MHz 时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动。)
#define CHANNEL 0
// 分辨率设置为 8,就是 2 的 8 次方,用 256 的数值来映射角度。
#define RESOLUTION 8
// 定义舵机 PWM 控制引脚。
#define SERVO 13
//定义函数用于输出 PWM 的占空比
int calculatePWM(int degree)
{
//20ms 周期内,高电平持续时长 0.5-2.5 ms,对应 0-180 度舵机角度。
//对应 0.5ms(0.5ms/(20ms/256))
float min_width = 0.6 / 20 * pow(2, RESOLUTION);
//对应 2.5ms(2.5ms/(20ms/256))
float max_width = 2.5 / 20 * pow(2, RESOLUTION);
if (degree < 0)
degree = 0;
if (degree > 180)
degree = 180;
//返回度数对应的高电平的数值
return (int)(((max_width - min_width) / 180) * degree + min_width);
}
void setup()
{
// 用于设置 LEDC 通道的频率和分辨率
ledcSetup(CHANNEL, FREQ, RESOLUTION);
// 将通道与对应的引脚连接
ledcAttachPin(SERVO, CHANNEL);
}
void loop()
{
for (int i = 0; i <= 180; i += 10)
{
// 输出PWM,设置 LEDC 通道的占空比。
ledcWrite(CHANNEL, calculatePWM(i));
delay(1000);
}
}
2. 使用第三方库控制舵机
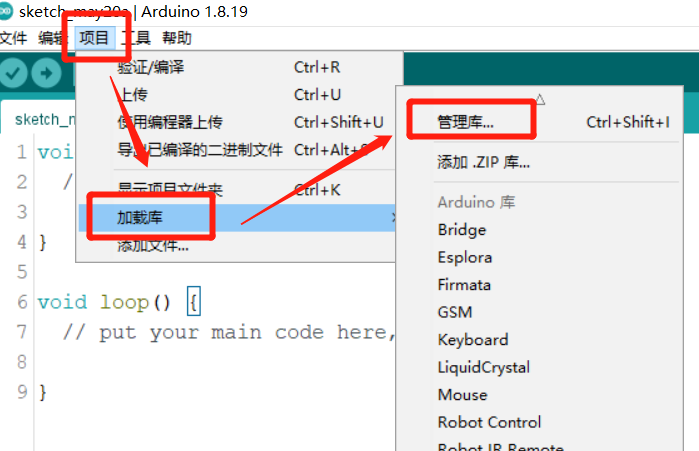
如果我们想要使用 Arduino 控制舵机就需要现在 ESP32Servo 库,点击 项目,选择 加载库 中的 管理库...。
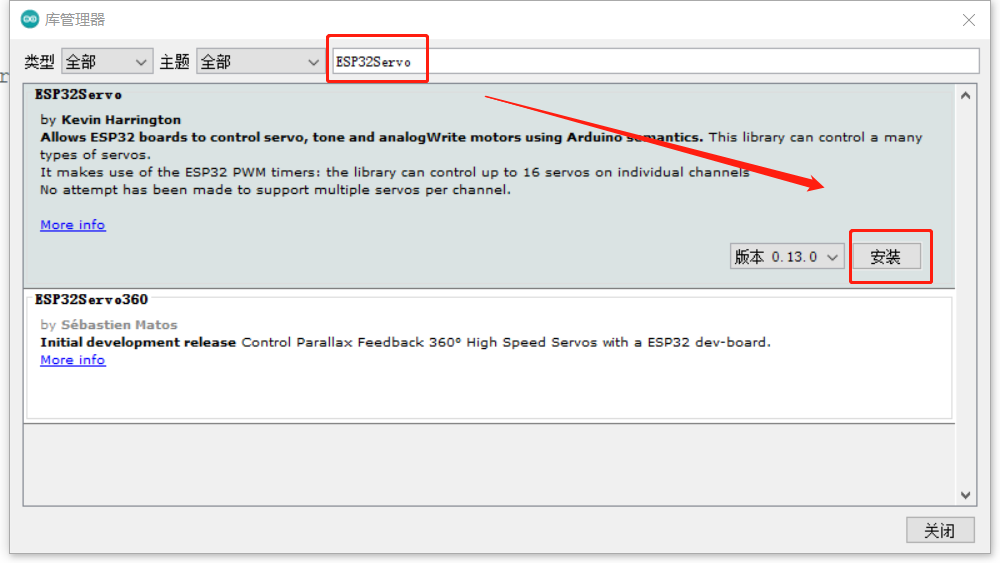
然后我们输入 ESP32Servo,点击安装即可。
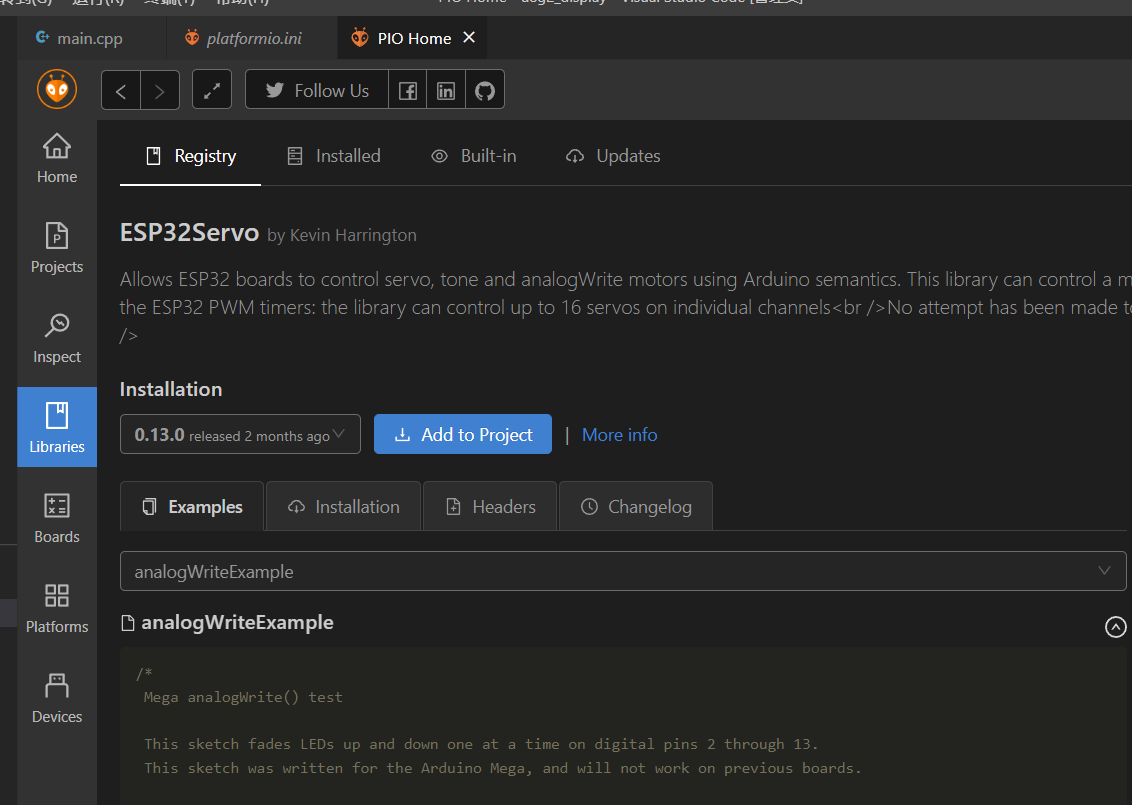
我们可以在 VSCode 的 PlatformIO 中,根据案例了解 ESP32Servo 库的使用方法
代码如下:
#include <ESP32Servo.h>
#define SERVO_PIN 13
#define MAX_WIDTH 2500
#define MIN_WIDTH 500
// 定义 servo 对象
Servo my_servo;
void setup() {
// 分配硬件定时器
ESP32PWM::allocateTimer(0);
// 设置频率
my_servo.setPeriodHertz(50);
// 关联 servo 对象与 GPIO 引脚,设置脉宽范围
my_servo.attach(SERVO_PIN, MIN_WIDTH, MAX_WIDTH);
}
void loop() {
my_servo.write(180);
delay(1000);
my_servo.write(0);
delay(1000);
}