四足机器人设计
这节课,我们学习一个 ESP32 单片机驱动 SG90 舵机的四足机器人。
1. SG90 舵机 - 参数化建模
如果我们使用 Fusion 360 不使用 参数化建模 的话,那我们在后面设计产品的时候呢,就会很麻烦,因为有很多数值,我们需要自己去记忆,但是,使用参数化建模的方式,就可以让我们省去很多记忆的过程,以及快速的调整模型的大小。
如果你想要从头开始设计一个新的东西,参数化建模对你来说就非常有用了,机械零件通常必须与其他零件完美配合。甚至有时候,你希望零件合适不同的尺寸的设计。比如在 DIY 领域很常用的 SG90 舵机,也是我们后面设计简单的四足机器人,要用到的核心零件。

由于不同厂家生产的尺寸有略微差异,在网上你可以找到各种尺寸的图纸,所以,如果你设计的舵机零件与你买到的舵机尺寸有差别,你就可以通过参数化建模的方式,把他修改一下,而不是重新画一个新的零件出来。而我们需要做的呢,就是打开 更改参数,并修改对应的值就可以了。如果你有任何的编程基础,你就明白,这些存储值的东西,其实就是变量,变量就是存储值的容器。你可以在定义尺寸时使用这些变量。
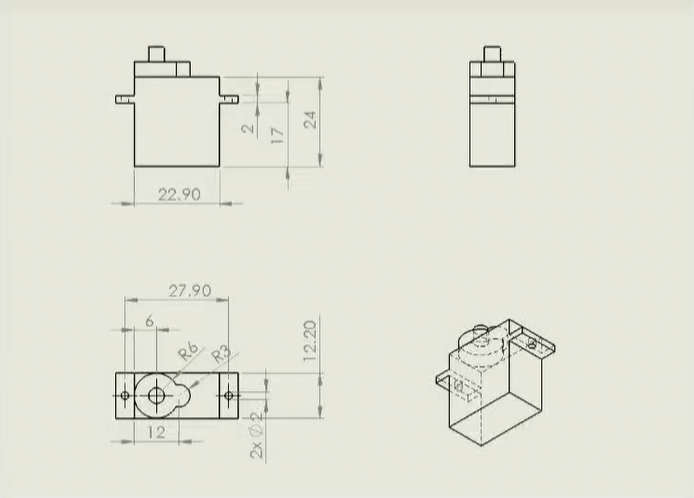
从上图中,我们可以看出来舵机的尺寸有很多,但是我们没有必要把所有的尺寸都参数化,只需要给那些与其他零部件产生关联的尺寸设置参数即可,比如舵机的长和宽,两个螺孔之间的距离。
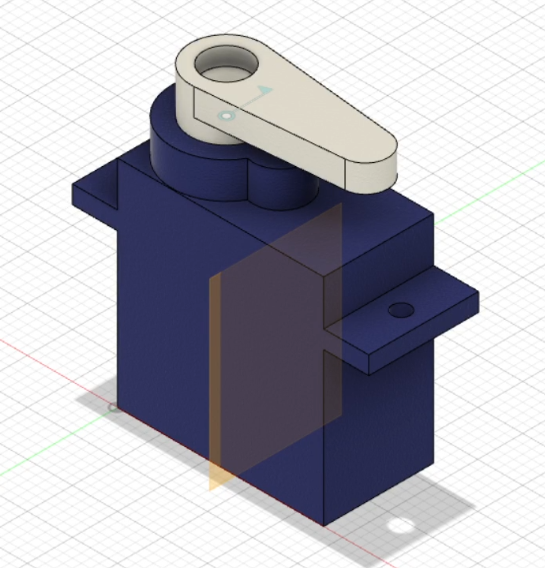
画好之后就是下面这个样子,具体操作可以查看视频教程
2. 机身
接着我们就该画机架了,舵机我们绘制的时候,还能找找工程图,绘制机身、肩件、足件的时候,我们就没有任何参考了。这个四足机器人使用的主控芯片是 ESP32 单片机,并且会使用扩展板与电池来驱动舵机,所以我们绘制的时候,需要明白我们的需求,我们首先需要把 ESP32 拓展板、电池盒,以及把 4 个舵机固定在机身上。
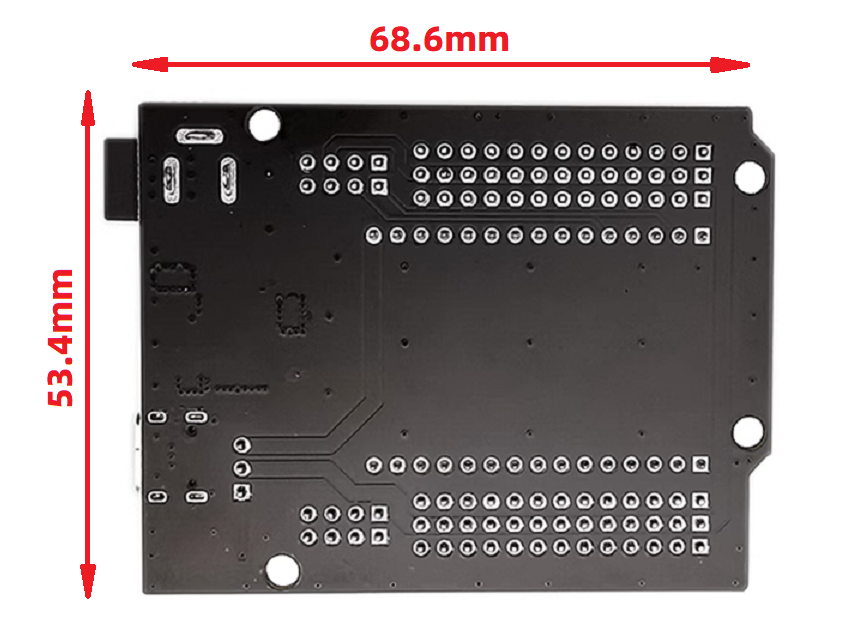
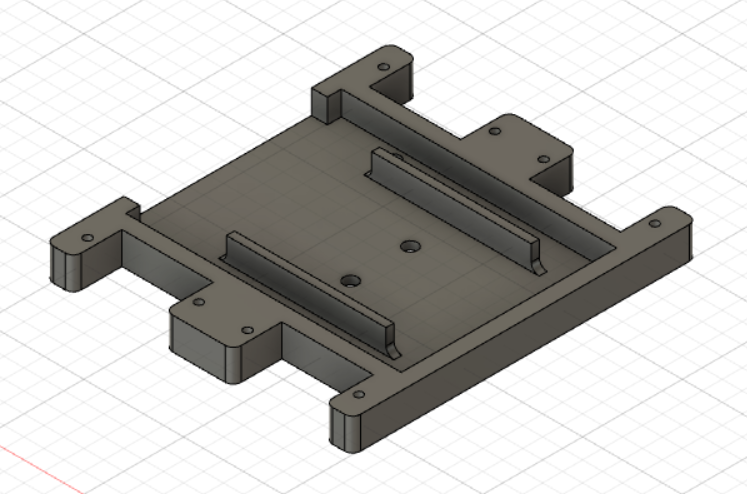
我们可以根据下面这张 ESP32 扩展板的背面图,绘制出边框轮廓,以及螺孔的位置。
画好之后就是下面这个样子:
我们也可以再画一个电池盒,并且把舵机零件复制几份,使用装配体命令将他们固定在一起:
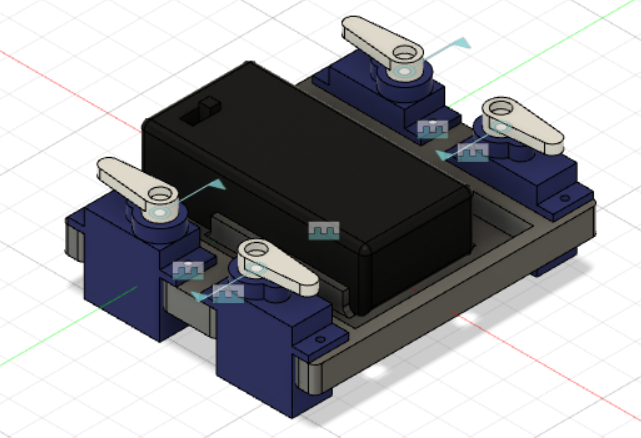
这样,我们的机身部分就画好了。
3. 足件
接着我们来画机器人的腿部,我们这个腿部零件的作用就是与地面接触,并且还要通过舵机来控制移动,因此,我们的足件需要有一个安装舵机的凹槽。最后,我们把这个零件通过镜像命令,就可以获得另一侧腿的零件了。
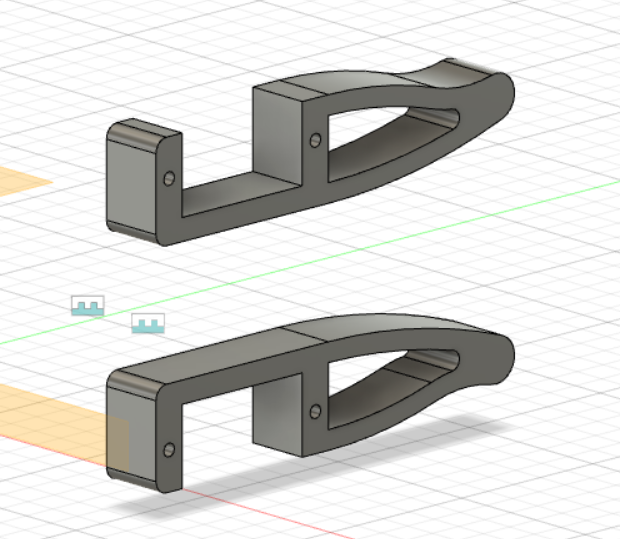
把他们两个复制一份,并且与舵机装配在一起,我们的足部零件就绘制完成了。
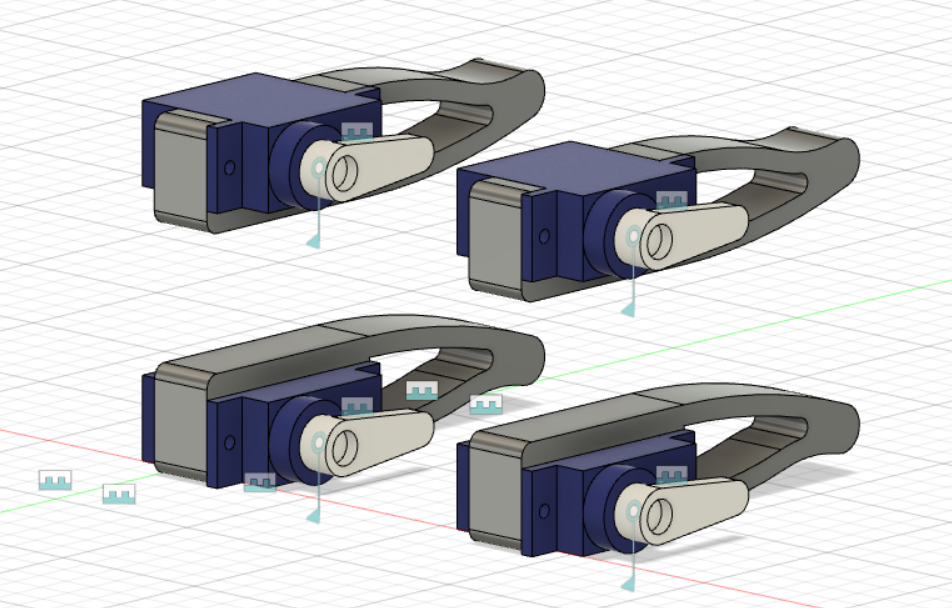
4. 肩件
最后就是来绘制肩件了,该零件最大的作用就是连接机身与足件,并且还要保证每个舵机只控制一个自由度,也就是只能在一个平面上移动,这样的话,我们的四足机器人每个腿部就能实现 2 个自由度方向的移动,而整体就有了 8 个自由度。
什么是自由度
在工程学中,自由度表示系统中可以独立变化的参数数量。例如,在机械系统中,一个物体的自由度可以表示它在空间中的位置和方向。
肩部零件设计的时候,有很多需要考虑的部分,比如:在旋转的时候,肩件不能与机身出现干涉;打印的时候尽量避免支撑;机身上固定的舵机与足件上的舵机相互垂直,肩件与舵机要紧密固定。综合以上 4 个因素,我们设计了这样的连接件。
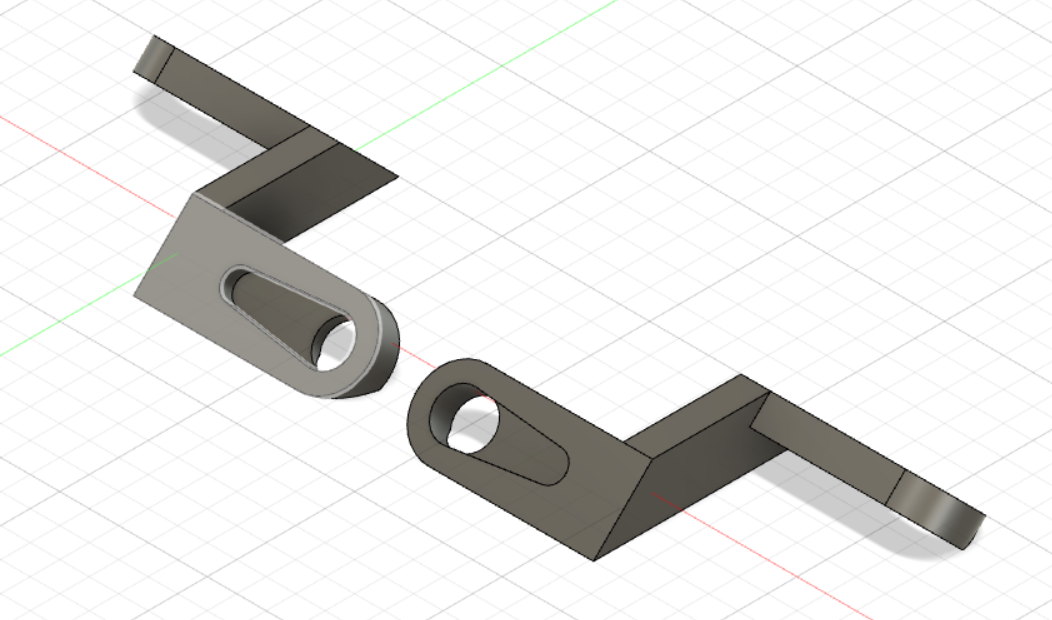
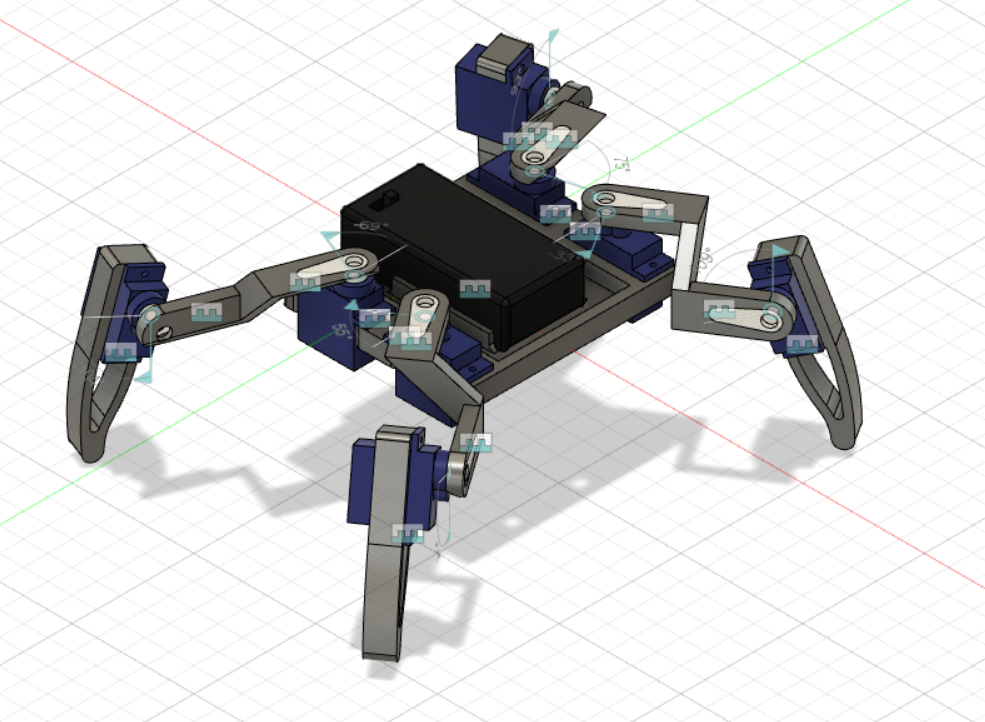
最后,我们把这些零件组装起来,并且限制一下舵机的转动角度,简单的四足机器人就完成了。