四足机器人
大约 2 分钟ESP32Arduino
实验原理
设计一个完整的四足机器人是一个复杂的任务,涉及到硬件设计、电路连接、控制算法和编程等多个方面。在此处无法提供完整的四足机器人设计,但我可以为你提供一个简单的概述,帮助你开始设计一个基本的四足机器人。
硬件部分:
机身结构:首先需要设计一个稳定的机身结构,确保机器人能够在移动时保持平衡。可以使用3D打印、金属或其他材料制作机身。
电机和关节:为机器人的每条腿选择合适的电机和关节,以使其能够实现前进、后退、转向和平衡等动作。
传感器:考虑在机器人上添加传感器,例如陀螺仪、加速度计、红外线传感器等,用于感知机器人的姿态和环境信息。
电源和控制电路:为机器人提供电源,并设计控制电路用于控制电机、传感器等设备。
控制部分:
运动控制:开发适当的运动控制算法,以便控制机器人的步态和动作。
步态规划:设计机器人的步态规划,以确保稳定行走和运动。
编程部分:
嵌入式编程:为机器人的 ESP32 控制板编写嵌入式程序,实现控制逻辑和算法。
通信:如果需要与其他设备或中心控制系统进行通信,编写相应的通信代码。
调试和测试:在完成编程后,对机器人进行调试和测试,确保其能够按预期运行。
请注意,这只是一个简单的概述,实际设计一个四足机器人涉及到更多的细节和工作。如果你对机器人设计和编程不熟悉,建议先学习有关电子、机械和编程的基础知识,然后逐步深入研究四足机器人的设计和实现。另外,还可以参考相关的开源项目和资料,以便更好地理解和构建你的四足机器人。
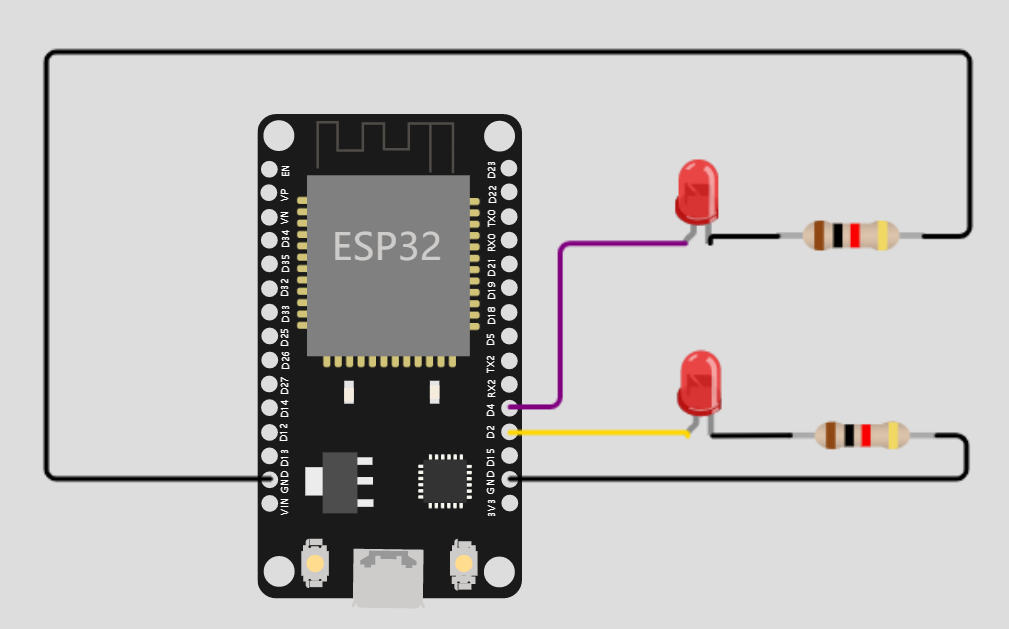
硬件电路设计
物料清单(BOM 表):
| 材料名称 | 数量 |
|---|---|
| 舵机 | 8 |
| ESP32 扩展板 | 1 |
| 杜邦线(跳线) | 若干 |
| 面包板 | 1 |
软件程序设计
LF RB 设置为 0°,LB RF 设置为 180°,可以不完全对齐,后期调试即可。